





































In a groundbreaking experiment, NASA astronaut Jonny Kim remotely commanded a team of four-legged robots to navigate a simulated Martian landscape, showcasing the potential for future robotic missions on Mars. This innovative exercise took place at the German Aerospace Center (DLR) facility in Oberpfaffenhofen in July 2023, with Kim orchestrating the mission from the International Space Station (ISS).
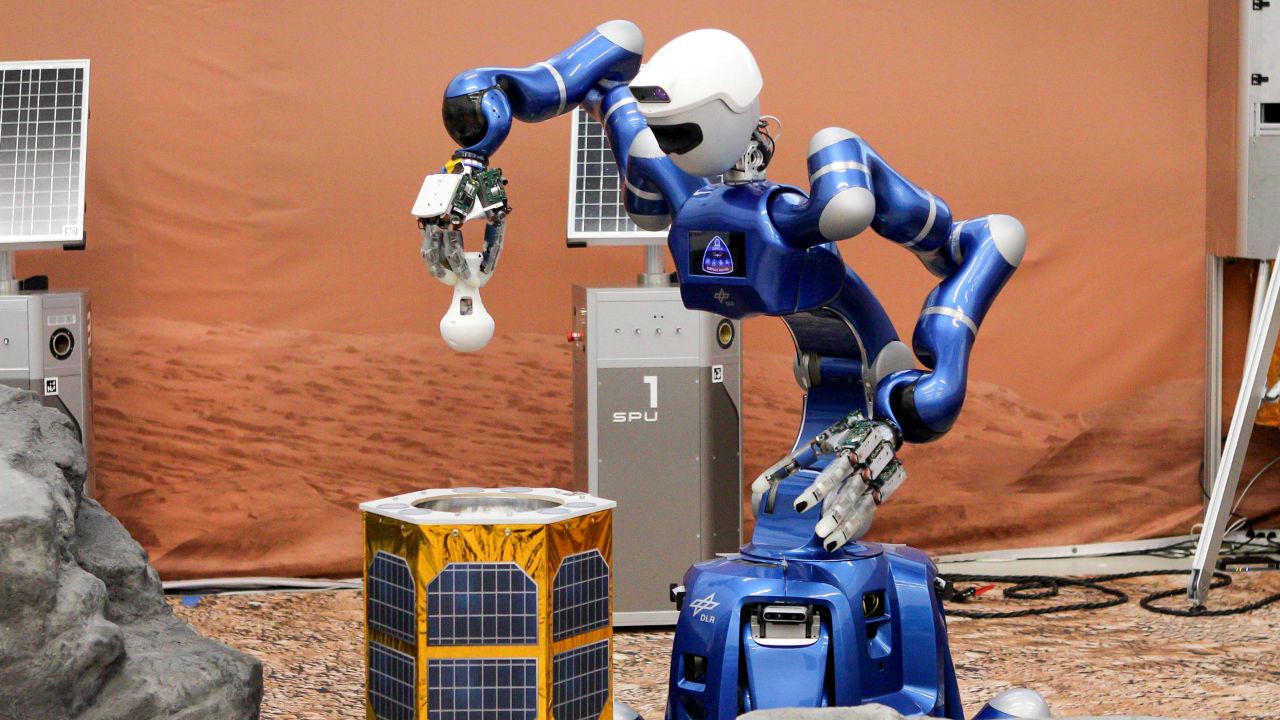
The collaborative effort involved the European Space Agency’s robot dog, Spot, and DLR’s humanoid robot, Rollin’ Justin, alongside the Interact rover. Kim communicated commands to the DLR facility, testing the robots’ abilities to solve complex problems in real-time. This exercise marked the culmination of the DLR Surface Avatar project, which started recruiting robots and astronauts in 2022.
Innovative Problem-Solving from Orbit
During this mission, Kim faced challenges that required quick thinking and adaptability. One notable scenario involved assisting a robot named Bert, which had been programmed to simulate a leg injury. Kim conducted a “training” session to help Bert adapt to moving on three legs, ultimately allowing the robot to continue its exploration of the simulated Martian caves. The caves contained drawings reminiscent of the prehistoric art found in the Lascaux caves in France, providing a fascinating aspect to the mission.
As Bert navigated tight spaces, Kim switched to manual control, using a joystick to guide the robot based on real-time visual feedback from its cameras. This hands-on approach allowed Kim to effectively maneuver Bert in a way that automated systems could not achieve in such confined environments.
Successful Collaboration and Future Implications
The mission’s success was a testament to the capabilities of human-robot interaction in space exploration. Kim and his team, including the AI chatbot Neal AI, effectively tackled various tasks, such as locating and retrieving sample containers. Spot played a critical role by autonomously transporting these samples to a designated transfer area, demonstrating the practical applications of robotics in extraterrestrial missions.
Thomas Krüger, team lead at ESA’s human-robot interaction lab, highlighted the significance of this experiment. He noted, “By involving an astronaut in microgravity and using relay satellites, we have overcome the technical hurdles involved in the remote control of robots.” This research could be pivotal for the Gateway project, NASA’s upcoming moon-orbiting space station that aims to support crewed and robotic Artemis missions.
In a symbolic conclusion to the experiment, Kim shared a virtual handshake with Neal Lii, a DLR scientist and principal investigator of the Surface Avatar project. Rollin’ Justin facilitated this moment by providing force feedback, enhancing the emotional connection between the astronauts despite the physical distance.
The collaborative efforts between NASA and DLR underscore the importance of international partnerships in advancing space exploration. As nations work together to explore the moon and Mars, missions like this one pave the way for future human and robotic endeavors beyond our planet.



























